Car with Trailers (car)¶
A car pulls multiple trailers. All parts of the vehicle have one axis for simplification.
The car moves forward with a velocity  and turns with a ratotional speed
and turns with a ratotional speed  .
The coordinates
.
The coordinates  and
and  describe the car’s distance to the origin of a stationary coordinate system.
describe the car’s distance to the origin of a stationary coordinate system.
The car’s and the trailer’s deflections regarding the horizontal line are  ,
,  and
and  .
.
The distances between the axles and the couplings from front to back are  ,
,  ,
,  and
and 
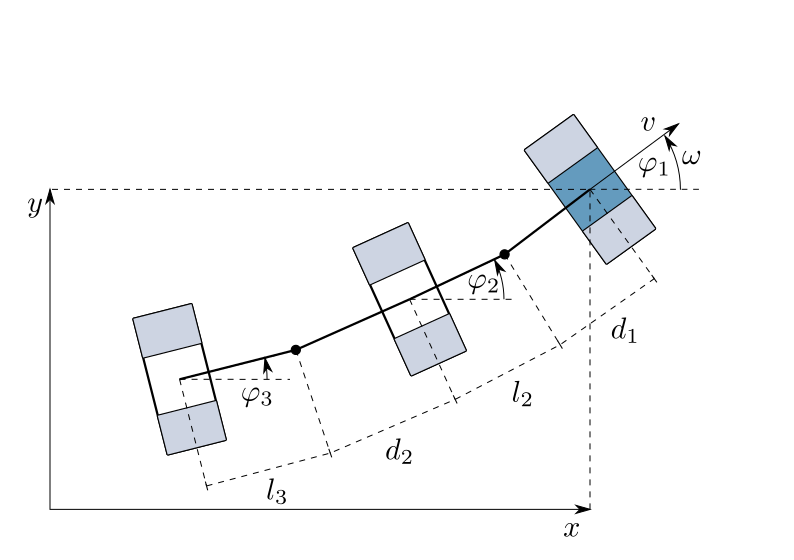
Fig. 14 The car system¶
With the state vector

the model equations are given by

with

The driving speed and the turning speed are set to constant values in the state function of the model.
They are potential actuating variables to control the system.
There is no output defined.
The example comes with no controller,
with a 2D visualization,
an external settings file containing all initial values for the parameters
and one regime loaded from the file default.sreg by the main at program start.
The structure of __main__.py allows starting the example without navigating to the directory
and using an __init__.py file to outsource the import commands for additional files.