Ball in Tube Model¶
A fan at the bottom of a tube produces an air stream moving upwards. A ball levitates in the air stream.
The fan rotates with the rotational speed  .
It produces an air stream with the velocity
.
It produces an air stream with the velocity  .
The factor
.
The factor  describes the proportionality between the air’s volume flow rate and the fan’s rotational speed.
The motor driving the fan is modeled as a PT2-element with the amplification
describes the proportionality between the air’s volume flow rate and the fan’s rotational speed.
The motor driving the fan is modeled as a PT2-element with the amplification  ,
the damping
,
the damping  and the time constant
and the time constant  .
An Arduino Uno controls the motor,
its discrete control signal
.
An Arduino Uno controls the motor,
its discrete control signal  has a range of
has a range of  and amplifies the supply voltage
and amplifies the supply voltage  .
.
The ball covers an area  and has a mass
and has a mass  .
Its distance to the tube’s bottom is the position
.
Its distance to the tube’s bottom is the position  .
The gap between the ball and the tube covers an area
.
The gap between the ball and the tube covers an area  .
The factor
.
The factor  describes the proportionality between
the force of flow resistance and the velocity of the air streaming through the gap.
describes the proportionality between
the force of flow resistance and the velocity of the air streaming through the gap.
The tube has a height  .
.
The task is to control the ball’s position .
Actuating variable is the motor’s control signal .
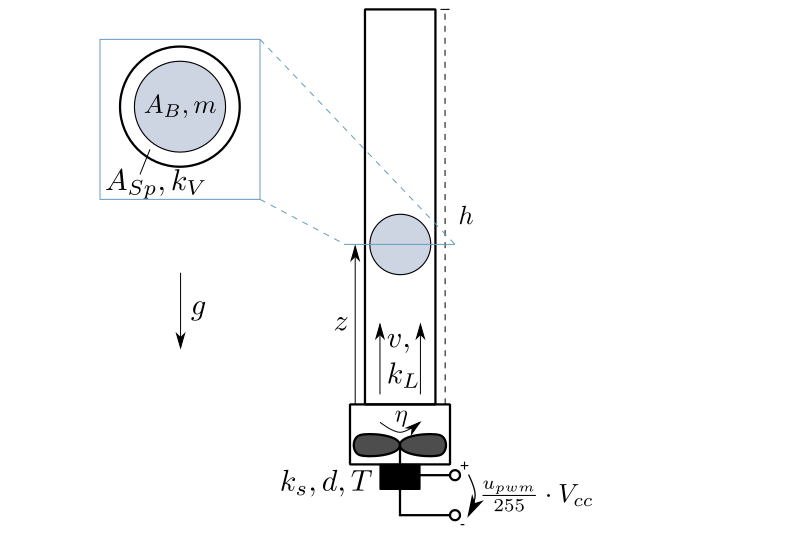
Fig. 12 The ball in tube system in detail¶
TWith the state vector

the model equations are given by

In case of the ball falling down and reaching a position  below the fan,
the root function of the model overrides the ball’s position
below the fan,
the root function of the model overrides the ball’s position  and velocity
and velocity  .
.
The model’s boundary condition is violated if the ball leaves the tube on the upper end:

The ball’s position

is chosen as output.